Relations et modélisation
Le moteur à courant continu est donc constitué d'un bobinage qui constitue l'inducteur. Son schéma équivalent peut donc se représenter comme une bobine L, une résistance et une source de tension e, appelée Force Contre-électromotrice. |
|
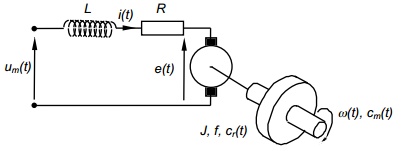
Force contre électromotrice - Modèle électrique
C'est une tension qui tend à s'opposer à la variation du courant dans le moteur. La FCEM est proportionnelle à la vitesse de rotation du moteur :
e(t) = ke x ω(t)
ou
E=ke x Ω
où ke est le coefficient de couple(en V/(rad/s).
Ω est la vitesse angulaire en (rad/s)
Du schéma équivalent ci-dessus on peut en déduire en régime transitoire :
Um(t) = L x (di(t)/dt) + R x i(t) + e(t)
En régime établi
Um = R x I + E
Couple et frottements - Modèle mécanique
Le moteur développe un couple mécanique dont la valeur est proportionnelle au courant absorbé :
Cm(t) = kc x i(t)
Cm = kc x I
où kc est le coefficient de couple(en Nm/(rad/s).
Dans le cas d'un moteur à aimant permanent Kc et Ke sont identiques.
En régime dynamique, la somme des couples est égale à J x [dω(t)/dt].
L'équation de l'arbre moteur est
cm(t) - cr(t) - f x ω(t) = J x [dω(t)/dt]
où Cr est le couple résistant
f est le frottement fluide en Nm/(rad/s)
J est le moment d'inertie par rapport à l'axe du moteur en Kgm²
Puissances
Puissance électrique
pabs(t) = um(t) x i(t)
P = Um x I
Puissance mécanique utile
pu(t) = cm(t) x ω(t)
Pu = Cm x Ω