Les autres moteurs
Moteur synchrone
Un moteur synchrone est un moteur alimenté en courant alternatif. Il est constitué d'un stator bobiné et d'un rotor aimanté. La fréquence de la tension d'alimentation détermine du champ magnétique tournant. Ainsi la fréquence de rotation de l'arbre du moteur est proportionnelle à la fréquence de la tension. Cette fréquence est : f= p x n où |
|
Le sens de rotation de ces moteurs est unique et dépend de la constitution des pôles. Très utilisé pour des ventilateurs, des grosses horloges, etc...
Moteur asynchrone
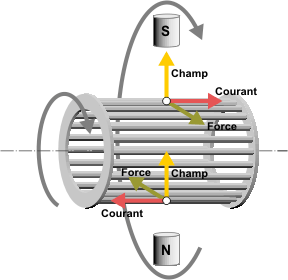
Lorsque l'on soumet, à un disque fixé sur un axe, un champ magnétique B variable, un courant induit appelé courant de Foucault apparaît dans le disque. Ce courant provoque la mise en rotation du disque (principe du moteur ou du compteur d'énergie électrique). Si le disque est entraîné, ce courant freine sa rotation (principe des freins des véhicules lourds). Le moteur asynchrone repose sur l'utilisation du courant de Foucault. |
|
Le rotor constitué d'un circuit électrique fermé (cage d'écureuil) est le siège d'un courant de Foucault qui l'entraîne en rotation. Ce moteur est alimenté le plus généralement en tension triphasée. Trois bobinages permettent d'obtenir un champ tournant uniforme. Comme pour un moteur synchrone, la vitesse de rotation est assez proche de la vitesse de synchronisme, mais il existe un écart appelé glissement. g = (Ns - N)/Ns |
|
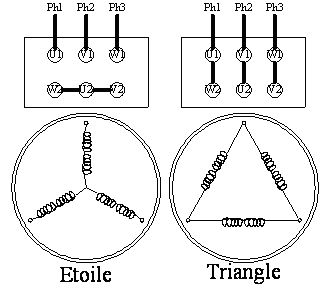
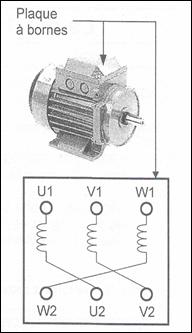
Branchements
L'existence de 3 bobinages dans un moteur asynchrone, autorise deux types de branchements. Le branchement étoile et le branchement triangle. Selon le cas, chaque bobinage supporte la tension entre phase (branchement triangle) ou cette même tension divisée par √3.
|
|
Le moteur pas à pas
Il s'agit d'un moteur utilisé pour du positionnement et on le rencontre donc dans les robots, les imprimantes, les objets de micro-mécanique, etc...
Ce moteur est composé de deux ou quatre bobinages (en général) et d'un rotor. Les bobinages sont alimentés par des tensions impulsionnelles. A chaque phase d'alimentation le rotaor change de position puis ce stabilise. Chacune de ces position est un pas. La constitution technologique du moteur permet d'obtenir une grande précision dasn le positionnement et il courant de trouver des moteurs de 200 ou 400 pas. |
|