Etude du système de traitement
Schéma fonctionnel
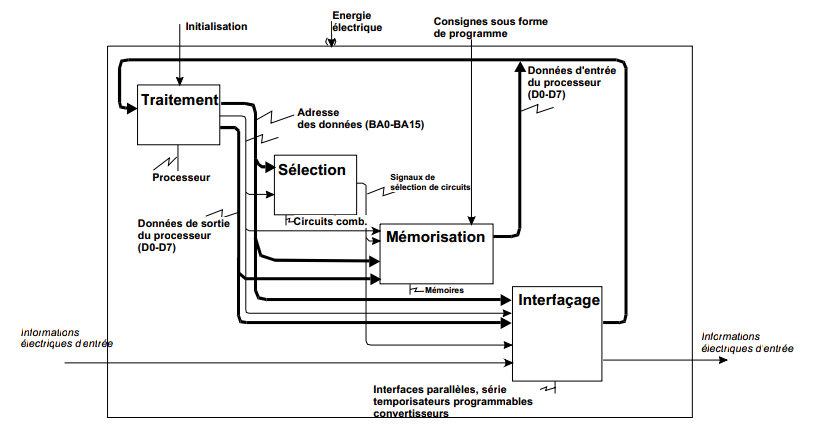
Composition
John Von Neumann a élaboré en 1946 un modèle de traitement de l'information qui a court encore aujourd'hui.
Dans ce modèle, trois blocs fonctionnels sont indispensables :
- l'unité centrale ou CPU qui réalise les opérations
- la mémoire qui stocke les informations (programme + données)
- l'unité d'interfaçage qui permet de communiquer avec l'extérieur
Les données (codes de programme et variables) sont véhiculées par un ensemble de fils appelé BUS DE DONNEES. Le bus de données est bidirectionnel et son nombre de fil dépend de la capacité de traitement du microprocesseur. 8 fils s'il s'agit d'un microprocesseur 8 bits.
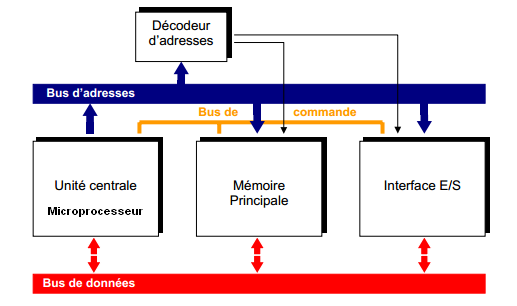
Le bus d'adresse unidirectionnel véhicule le numéro de la case mémoire vers laquelle la donnée doit aller ou d'où elle doit venir.
Le bus de commande comporte des signaux utiles au fonctionnement de l'ensemble (signaux de cadencement, sélection de lecture ou d'écriture, etc....).
L'unité centrale
 C'est le microprocesseur qui est chargé d’interpréter et d’exécuter les instructions d’un programme, de lire ou de sauvegarder les résultats dans la mémoire et de communiquer avec les unités d’échange. Toutes les activités du microprocesseur sont cadencées par une horloge.
C'est le microprocesseur qui est chargé d’interpréter et d’exécuter les instructions d’un programme, de lire ou de sauvegarder les résultats dans la mémoire et de communiquer avec les unités d’échange. Toutes les activités du microprocesseur sont cadencées par une horloge.
Les caractéristiques principales du microprocesseur sont :
- sa fréquence d’horloge : en MHz ou GHz
- le nombre d’instructions par secondes qu’il est capable d’exécuter : en MIPS
- la taille des données qu’il est capable de traiter : en bits
La mémoire principale
Elle contient les instructions du, ou des, programmes en cours d’exécution et les données associées à ce programme. Physiquement, elle se décompose souvent en:
- une mémoire morte ( ROM = Read Only Memory ) chargée de stocker le programme. C’est une mémoire à lecture seule.
- une mémoire vive ( RAM = Random Access Memory ) chargée de stocker les données intermédiaires ou les résultats de calculs. On peut lire ou écrire des données dedans, ces données sont perdues à la mise hors tension.
Remarque : concernant les disques durs ou autres CD on les appelle le plus souvent des mémoires de masse en raison de leur grande capacité de stockage
Les interfaces d'entrées/sorties
Elles permettent d’assurer la communication entre le microprocesseur et les périphériques. (capteur, clavier, moniteur ou afficheur, imprimante, modem, etc…).
Elle est associée à des composants appelés COUPLEURS.
Adresses et décodage d'adresses
La multiplication des périphériques autour du microprocesseur oblige la présence d’un décodeur d’adresses chargé d’aiguiller les données présentes sur le bus de données.
En effet, le microprocesseur peut communiquer avec les différentes mémoires et les différents boîtier d’interface. Ceux-ci sont tous reliés sur le même bus de données et afin d’éviter des conflits, un
seul composant doit être sélectionné à la fois.
Lorsqu’on réalise un système micro programmé, on attribue donc à chaque périphérique une zone d’adresse et une fonction « décodage d’adresses » est donc nécessaire afin de fournir les signaux de
sélection de chacun des composants. Ces signaux se nomment généralement Chip Select (CS).